ESP32-CAM Blynk Motion Sensor (RCWL-0516) with LINE Notification
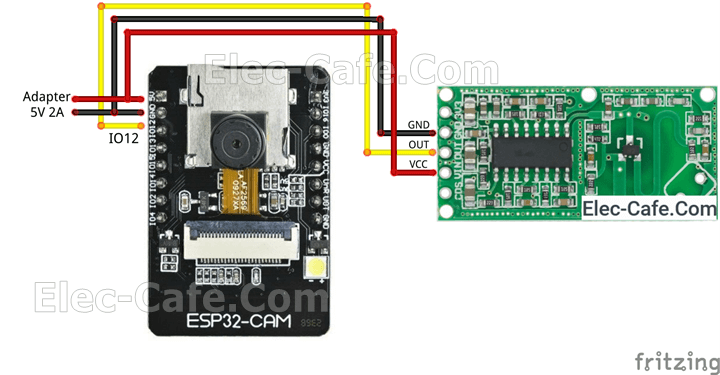
ESP32-CAM using Blynk App and Microwave Radar Motion Sensor (RCWL-0516). When sensor detects motion it takes a photo and send to LINE Chat.
Upload code to ESP32-CAM board with Arduino IDE
#define BLYNK_PRINT Serial
#include <WiFi.h>
#include <WiFiClient.h>
#include <BlynkSimpleEsp32.h>
#include "esp_camera.h"
#include "esp_system.h"
hw_timer_t *timer = NULL;
void IRAM_ATTR resetModule(){
ets_printf("reboot\n");
esp_restart();
}
//Get Auth Token in the Blynk App.
//value from pin V1:CAM V2:Sensor
char auth[] = "Your_Blynk_Auth_Token";
#include <TridentTD_LineNotify.h>
#define SSID "Your_ssid"
#define PASSWORD "Your_Password"
#define LINE_TOKEN "Your_Line_Token"
// Pin definition for CAMERA_MODEL_AI_THINKER
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
int Radar_Sensor = 12; //Your Sensor Pins
int pinSensor = 0 ,Cam_capture = 0 ,time_capture=0;
boolean startTimer = false;
unsigned long time_now=0;
// This function will be called every time Slider Widget
// in Blynk app writes values to the Virtual Pin V1
BLYNK_WRITE(V1){
Cam_capture = param.asInt();
}
BLYNK_WRITE(V2){
pinSensor = param.asInt();
}
void setup()
{
Serial.begin(115200);
while (!Serial) { ; }
WiFi.begin(SSID, PASSWORD);
Serial.printf("WiFi connecting to %s\n", SSID);
while(WiFi.status() != WL_CONNECTED) { Serial.print("."); delay(400); }
Serial.printf("\nWiFi connected\nIP : ");
Serial.println(WiFi.localIP());
LINE.setToken(LINE_TOKEN);
Blynk.begin(auth,SSID, PASSWORD);
timer = timerBegin(0, 80, true); //timer 0, div 80Mhz
timerAttachInterrupt(timer, &resetModule, true);
timerAlarmWrite(timer, 20000000, false);
timerAlarmEnable(timer); //enable interrupt
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
if(psramFound()){
// FRAMESIZE_ +
//QQVGA/160x120//QQVGA2/128x160//QCIF/176x144//HQVGA/240x176
//QVGA/320x240//CIF/400x296//VGA/640x480//SVGA/800x600//XGA/1024x768
//SXGA/1280x1024//UXGA/1600x1200//QXGA/2048*1536
config.frame_size = FRAMESIZE_VGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_QQVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// Init Camera
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
}
void loop()
{
Blynk.run();
timerWrite(timer, 0); //reset timer (feed watchdog)
long tme = millis();
if(Cam_capture == 1)
Camera_capture();
if(digitalRead(Radar_Sensor) == 1 && startTimer != true && pinSensor == 1){
Camera_capture();
startTimer = true;
}else if(digitalRead(Radar_Sensor) == 0){
startTimer = false;
time_capture=0;
}
if(digitalRead(Radar_Sensor) == 1 && pinSensor == 1){
if(++time_capture > 4){
time_capture=0;
Camera_capture();
Serial.println("Over Time");
}
}
delay(500);
}
void Camera_capture() {
camera_fb_t * fb = NULL;
delay(200);
// Take Picture with Camera
fb = esp_camera_fb_get();
if(!fb) {
Serial.println("Camera capture failed");
return;
}
Send_line(fb->buf,fb->len);
esp_camera_fb_return(fb);
Serial.println("OK");
}
void Send_line(uint8_t *image_data,size_t image_size){
LINE.notifyPicture("DETECT!!",image_data, image_size);
}{kind=link}